












Mechatronics Laboratory
- Home
- Faculty of Engineering & Technology
- Department of Mechatronics Engineering
- Mechatronics Laboratory
Mechatronics Laboratory
Mechatronics Laboratory under the Department of Mechatronics Engineering is a state-of-the-art facility, offers a dynamic learning environment to Mechatronics and Robotics students. It also provides a platform for students experimenting with the modern technologies such as mechatronics, Industry 4.0, cooperative robotics, human-friendly robotics. Students gain comprehensive, multi-domain knowledge and practical experience in system-level integration using advanced equipment, supporting both academic coursework and faculty/student research. This lab is a crucial resource for developing the next generation of mechatronics engineers.” The lab is equipped with modern computers which students use them for modelling and simulations of robotic applications in Windows and Linux platforms. Robotic studio, Robot Operating System (ROS), CAD software and programming software: C++, Python, MATLAB are widely used for teaching and learning and for research.
Specifications
Infrastructure and Equipment's
Mechatronics Laboratory is spread over large area to house 35 computers and enough work table for the students. The laboratory houses sophisticated and advanced equipment’s worth close to Rs.1 Crore with the recent addition of ABB Yumi dual-arm collaborative robot in the year 2019, the first of its kind in an educational institution in India. Further details of equipment and specification can be found in the laboratory webpage.
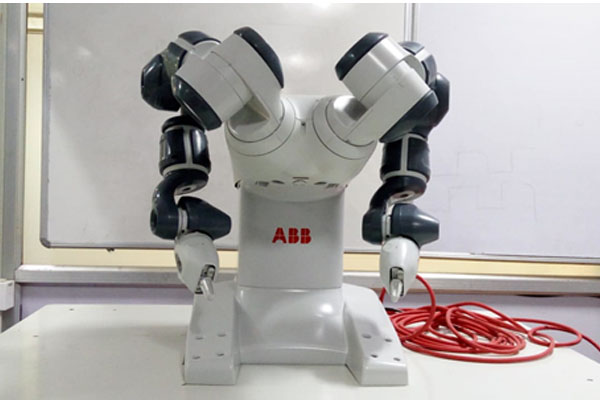
ABB YUMI DUAL ARM ROBOT
Designed for small parts assembly, YUMI is a two-armed robot that works safely alongside humans. Equipped with flexible hands, vision-guided part recognition, and sophisticated control, YUMI allows for seamless human-robot collaboration in standard manufacturing settings, maximizing the combined strengths of both. Its "inherently safe" design guarantees worker safety.
Quantity: 1 No.

NI SMART CAMERA
Smart cameras are self-contained vision systems, integrating processing power and image capture in a single unit. They offer versatile connectivity through digital I/O, serial ports, and Gigabit Ethernet, enabling seamless integration with industrial equipment like PLCs, HMIs, and robots. Software tools like Vision Builder AI and LabVIEW allow for customized configuration and programming.
Quantity: 1 No.

NATIONAL INSTUMENT DANI MOBILE ROBOT 1.0
The DaNI robot, part of the NI Robotics Starter Kit 1.0, is a mobile platform designed for embedded control. It utilizes an NI Single-Board RIO, featuring a powerful processor and FPGA, to manage its motors and ultrasonic distance sensor. This four-wheeled robot is capable of autonomous movement and distance measurement. The NI sbRIO-9632 within DaNI provides extensive digital and analog input/output capabilities, enabling complex control and data acquisition.
Quantity: 1 No.

NATIONAL INSTRUMENT DANI MOBILE ROBOT 2.0
Developed through a partnership between Pitsco and National Instruments, the DaNI 2.0 is a robot designed for speed and adaptability. Its core is an sbRIO controller, featuring both a Real-Time processor and an FPGA chip. This powerful combination enables it to handle demanding applications. Equipped with an ultrasonic sensor and optical encoders, the DaNI 2.0 can navigate obstacles and accurately track its position.
Quantity: 3 No.
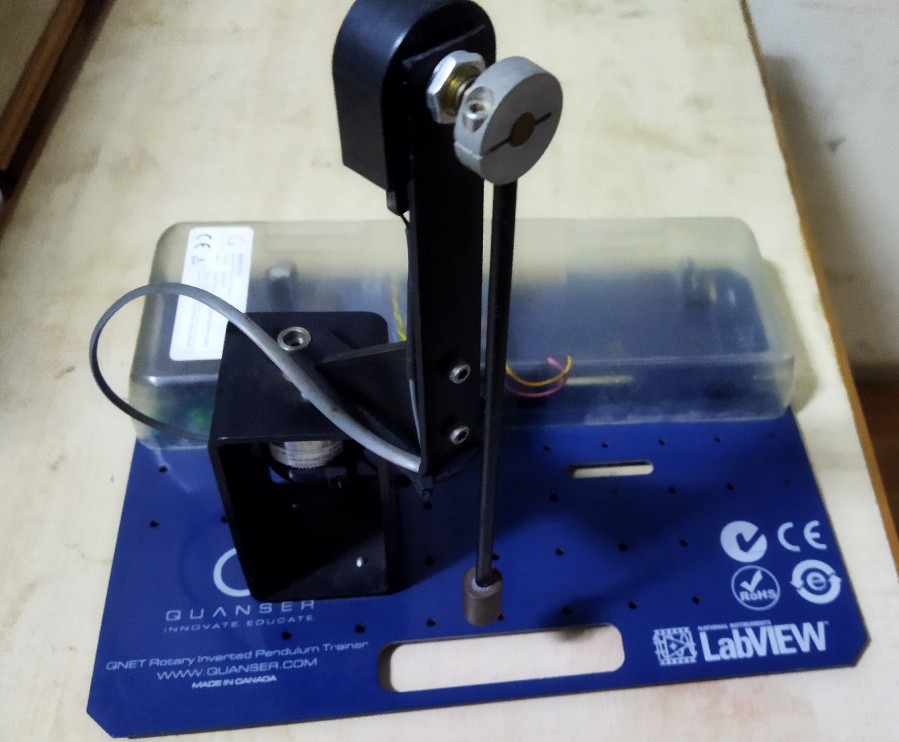
ROTARY INVERTER PENDULUM
The QNET Mechatronics Sensor MECHKIT Trainer provides a comprehensive learning experience with its diverse array of components. It includes ten different sensor types, two switch types, a push button, and two LEDs. This module is designed to educate users on the fundamental physical properties, application techniques, and limitations of common sensors found in modern technology. With twelve independent experiments covering topics like strain gauges, pressure, temperature, and optical sensing, students can gain practical insights into real-world sensor applications.
Quantity: 1 No.

Add on Boards for Elvis - NI DC Motor Control Stand
The QNET DCMCT module, intended for DC motor control, integrates with the NI-ELVIS platform. This system requires a PC equipped with an NI E-Series or M-Series data acquisition card, which acts as the interface between the hardware and a LabVIEW program. The LabVIEW software uses the card to acquire data from the encoder, tachometer, and current sensor, and subsequently regulates the voltage supplied to the motor.
Quantity: 1 No.

QUANSER SENSORS BOARD
The Quanser sensors board provides a hands-on learning experience, illustrating the core principles of actuators frequently used in mechatronic systems. It utilizes the NI ELVIS platform and LabVIEW™ software to facilitate this understanding.
Quantity: 1 No.

Vertical Take-off Landing (VTOL)
VTOL refers to aircraft capable of taking off and landing vertically, eliminating the need for runways. This technology is increasingly relevant in areas like urban air mobility and drone applications. A prominent element is the Quanser QNET 2.0 VTOL system, which is designed to work with the NI Educational Laboratory Virtual Instrumentation Suite (NI ELVIS) and LabVIEW software. This combination provides a platform for hands-on learning and experimentation with control systems, modeling, and flight dynamics. Students gain practical experience in designing and implementing control algorithms for VTOL aircraft.
Quantity: 1 No

KEYSIGHT DIGITAL MULTIMETER
The Keysight U1233A is a user-friendly, handheld 3 ½ digit digital multimeter from the U1230 series. Designed for convenience, it features a built-in flashlight for illuminating work areas and allows for single-handed operation of the measurement functions. Practical features like Vsense non-contact voltage detection, an audible continuity beeper, and a flashing backlight enhance ease of use. This versatile tool measures a wide range of parameters, including AC/DC voltage and current, resistance, frequency, capacitance, temperature, and performs diode tests.
Quantity: 3 No.

D SPACE CONTROLLER
The dSPACE DS1104 controller's connector panel interfaces with the ControlDesk developer software. This software allows users to create intuitive graphical interfaces for controlling and monitoring experiments. ControlDesk enables the design of layouts with various control elements, facilitating real-time adjustment of control parameters and observation of I/O signals connected to hardware.
Quantity: 1 No.

DOBOT MAGICIAN
The DOBOT Magician is a versatile desktop robotic arm designed for educational training. Its interchangeable end-tools enable diverse applications, including 3D printing, writing, and drawing. With 13 expansion ports and compatibility with over 20 programming languages, it provides a flexible platform for students to explore their creativity and develop advanced programming skills. Its robust hardware and intuitive software make it an ideal educational tool.
Quantity: 3 No

Dobot M1
The DOBOT M1 is a user-friendly and affordable collaborative SCARA robot designed for light industrial applications. Its compact, all-in-one design streamlines setup by eliminating external wiring, while its plug-and-play functionality and portability minimize downtime. Safety is prioritized with collision detection for human-robot collaboration, and its slim forearm reduces the risk of accidental damage. Simplified calibration through scripting and graphical programming, along with versatile connectivity options, makes the M1 highly accessible. Enhanced features like dynamic grabbing, tracking, and fast IO control further optimize its performance.
Quantity: 1 No.

DUCKIEBOT
The DB21M Duckiebot stands out with its vibrant blue, triple-layered chassis and a significant upgrade to an NVIDIA Jetson Nano 2GB processing unit. Its advanced sensor package includes a camera, time-of-flight sensor, IMU, and wheel encoders. The DB21M further distinguishes itself with new electronics (HUT v3.1, bumpers), a screen, a button, and a dedicated Duckie battery.
Quantity: 10 No.

3D PRINTER
3D printing is a rapidly evolving field, with ongoing advancements in materials, technologies, and applications. Lab is equipped with a 3D printer for making prototype of components quickly. The printer is used for academic teaching, Minor and Major projects of the curriculum. Research students are using the 3D printer for verifying and validating the geometric and functional designs of the novel ideas and concepts.
Lab Utilization
- Academic
- Project Support
- Research
No data was found
Location and Access time
The Mechatronics Laboratory, situated in HI-TECH, H202, is open from 8:45 AM to 5:15 PM on weekdays and Saturdays. Access to research equipment necessitates prior authorization and is contingent upon available time slots, with priority given to scheduled academic lab sessions. Refer to the details of the contact personal from the list below.
No data was found
Total Lab Investment
The Mechatronics Laboratory offers a well-equipped space with 30 computers and ample student workspaces. Featuring nearly Rs. 1 Crore worth of state-of-the-art equipment, including the unique-in-India Dobots and Duckiebot and Yumi cobot, the lab provides a cutting-edge learning environment. Detailed equipment specifications are available on the laboratory webpage.
No data was found
Lab Manual
The laboratory experiments are categorized into basic four modules namely, Elements of Mechatronics System, Modelling and Simulation, Mechatronic Systems and Robotics module. The list of experiments under each module is as given below.
- ELEMENTS OF MECHATRONICS SYSTEMS
- Open loop control of DC Motor
- Control of Stepper Motor
- Range Measurement using Ultrasonic sensor
- Quadrature decoding of encoder for position and velocity
- Vision based Inspection
- MODELLING AND SIMULATION
- Introduction to Mathematical modelling of physical systems
- Introduction to physical modelling
- Modelling and position control of a one degree of freedom planar mechanism
- MECHATRONIC SYSTEMS
- Closed loop position control of DC motor
- Closed loop velocity control of DC motor
- Open loop control of Mobile robot
- Closed loop control of Mobile robot
- Vertical take off and landing control
- Control of rotary inverted pendulum
- Closed loop control of pneumatics cylinder
- PLC control of pneumatics cylinder
- ROBOTICS
- Understanding the rotation and homogenous transformation using robotics toolbox for MATLAB
- Developing various robot configuration using robotics toolbox for MATLAB
- Forward kinematics of a robot using robotics toolbox for MATLAB
- Jacobian computation and understanding the singularity of a RR planar manipulator
- Inverse Kinematics of a 6R manipulator using robotics toolbox for MATLAB
- Trajectory planning for a 6R manipulator using robotics toolbox for MATLAB
- The lab manual for reference is given in the laboratory webpage.
No data was found
No data was found
Profile
The lab was established during the year 2010 and has been upgrading since then to provide the best training to the students. The availability of sophisticated equipments and facilities has been an advantage for their projects and research. Hence our lab supports the students for their major projects and research apart from regular academic curriculum.
Contact Persons
Dr. Madhavan Shanmugavel
Lab Head
madhavas2@srmist.edu.in
Mr. Josin Hippolitus
Lab Head
josinhia@srmist.edu.in
Technical Assistant
Ms. Vinothini B
Technical Assistant
vinothib@srmist.edu.in

Mechanical hangar,MEHA201
